Control Circuit
PROSTHETIC_HAND_CONTROL_CIRCUIT
Published:2009/7/16 21:28:00 Author:Jessie | From:SeekIC
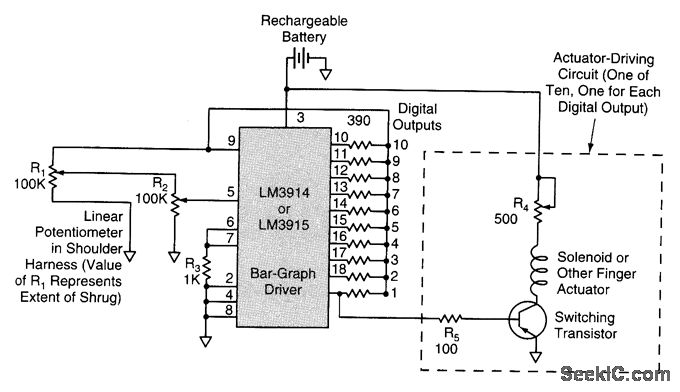
A proposed circuit for the control of an electromechanical prosthetic hand would derive electrical control signals from shoulder movements. The harness would contain a linear potentiometer (R1 in the figure), the resistance of which would be varied by shrugging the shoulder, as in the older mechanical system. The variable output voltage of the potentiometer would be fed to art attenuating potentiometer (R2), which would be set to scale the voltage to the range of shoulder movement. The scaled voltage would be fed to an analog-to-digital converter of the type used to control a bar-graph display. Either a linear or a logarithmic converter could be used, depending on the requirements of the user. Each digital output, in continuous or single-pulse mode, would be fed to a transistor switch, which would supply current to a solenoid or motor to actuate one of the prosthetic fingers. With no shrug, the prosthetic thumb and all of the prosthetic fingers would be extended. As the shrug is increased, the digital outputs would turn on in sequence, thereby causing the thumb and fingers to move sequentially to the closed position.
Reprinted Url Of This Article:
http://www.seekic.com/circuit_diagram/Control_Circuit/PROSTHETIC_HAND_CONTROL_CIRCUIT.html
Print this Page | Comments | Reading(3)

Article Categories
power supply circuit
Amplifier Circuit
Basic Circuit
LED and Light Circuit
Sensor Circuit
Signal Processing
Electrical Equipment Circuit
Control Circuit
Remote Control Circuit
A/D-D/A Converter Circuit
Audio Circuit
Measuring and Test Circuit
Communication Circuit
Computer-Related Circuit
555 Circuit
Automotive Circuit
Repairing Circuit
Code: