Control Circuit
DC_MOTOR_CONTROL
Published:2009/7/5 21:21:00 Author:May | From:SeekIC
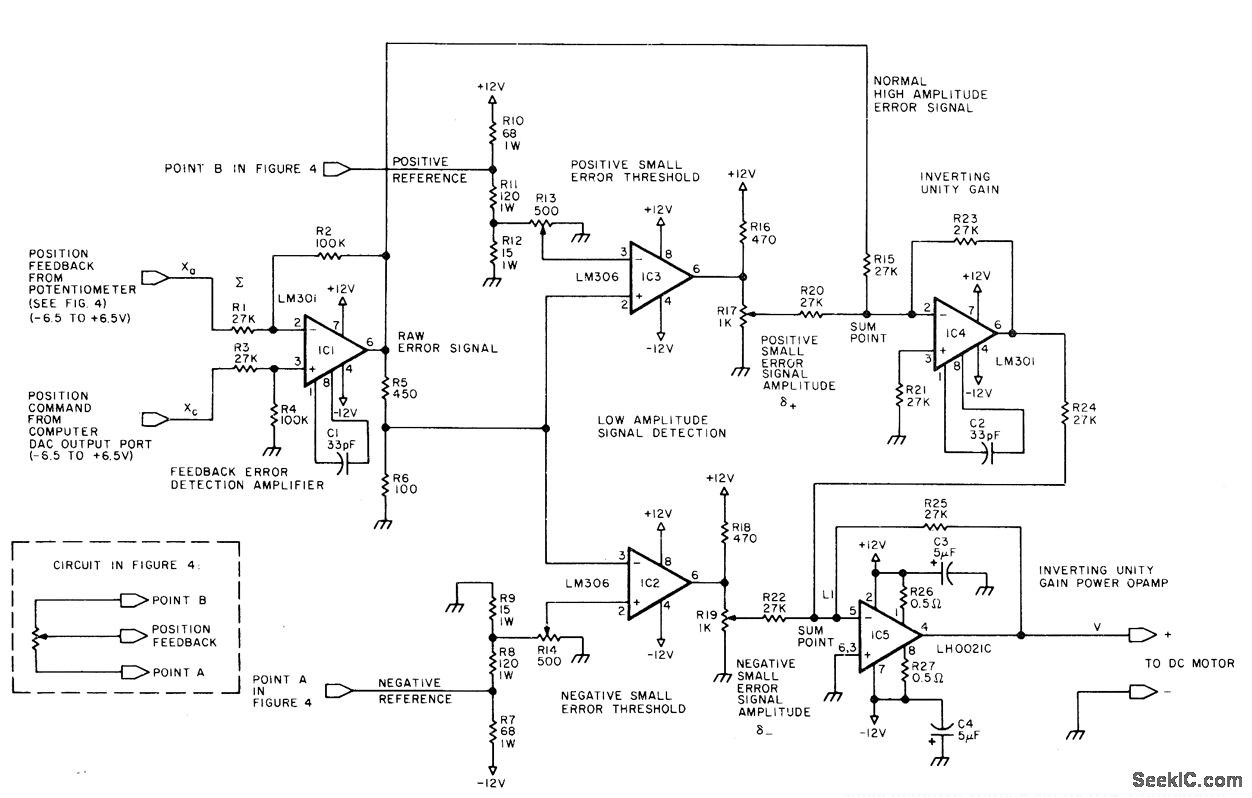
Developed for use in realistic Iunar lander simulation display. Throttle signal and altitude signal serve as inputs to microprocessor. Feedback position-measuring pot is geared to 12-VDC motor so fuil travel of pot shaft occurs while lunar module traverses full altitude range. Circuit provides minimum drive voltage required by DC motor for motion to occur. Output of difference amplifier IC1 goes to summing amplifier IC4 as one component of final motor voltage. Comparators IC2 and IC3 sense when difference voltage is larger than small positive voltage set by R13 or smallerthan small negative voltage set by R14. Comparator output then becomes 12 V, and portion of this (about 2 V) drives motor into operating range.IC5 is high-power opamp delivering 1 A at 12 V.-L. Sweer,T. Dwyer, and M. Critchfield, Controlling Small DC Motors with Analog Signals, BYTE, Aug. 1977, p 18-20, 22, and 24.
Reprinted Url Of This Article:
http://www.seekic.com/circuit_diagram/Control_Circuit/DC_MOTOR_CONTROL.html
Print this Page | Comments | Reading(3)

Article Categories
power supply circuit
Amplifier Circuit
Basic Circuit
LED and Light Circuit
Sensor Circuit
Signal Processing
Electrical Equipment Circuit
Control Circuit
Remote Control Circuit
A/D-D/A Converter Circuit
Audio Circuit
Measuring and Test Circuit
Communication Circuit
Computer-Related Circuit
555 Circuit
Automotive Circuit
Repairing Circuit
Code: